This is the website of Alan McConchie. Scroll down for more.
Pronouns: he/him/his
Pronunciation: A-len mak-KAWN-kee
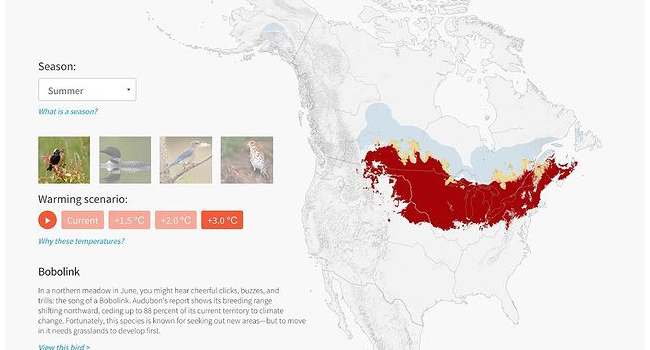
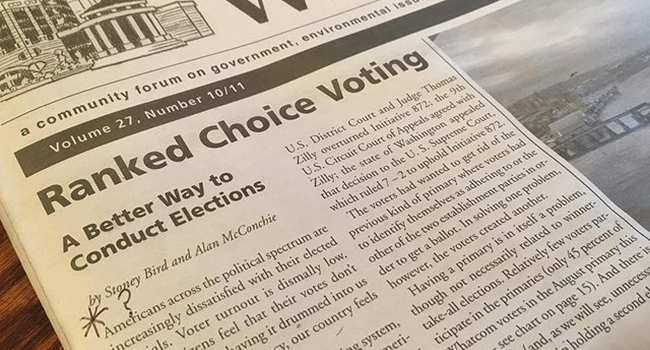
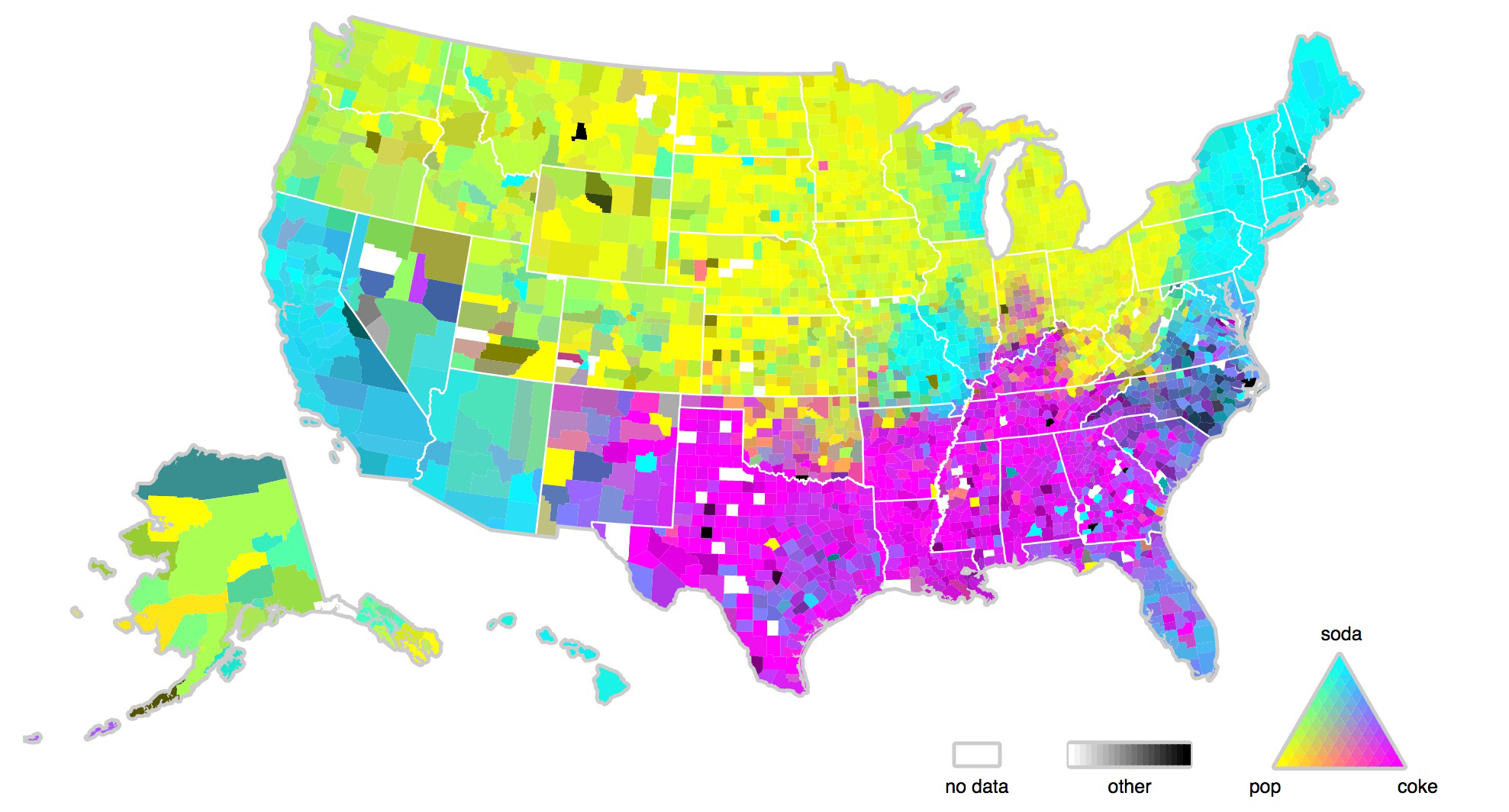
Posts mainly about maps, elections, and local news
Occasional blog posts
Maps sometimes, cats more frequently
Want to work with me or with Stamen?
Feel free to get in touch with me via the social media site of your choice. Or...